ADDRAR IV is an AI-powered catamaran that detects, navigates to, and collects floating debris — built by five engineering seniors at Texas A&M University Corpus Christi.

Built and supported at
About the Project
ADDRAR IV is an autonomous surface vehicle (ASV) built by the Engineering Senior Design team at Texas A&M University Corpus Christi, building on the Phase 1 hull foundation from earlier TAMUCC teams. With 5.25 trillion pieces of plastic debris in the ocean and 269,000 tons floating on the surface, the team developed a sustainable solution for coastal communities.
The system integrates a YOLO11s vision model on a Raspberry Pi 5 with an ESP32 motor controller for real-time debris detection and collection — removing trash from the waterway without human intervention during the mission.
Core Capabilities
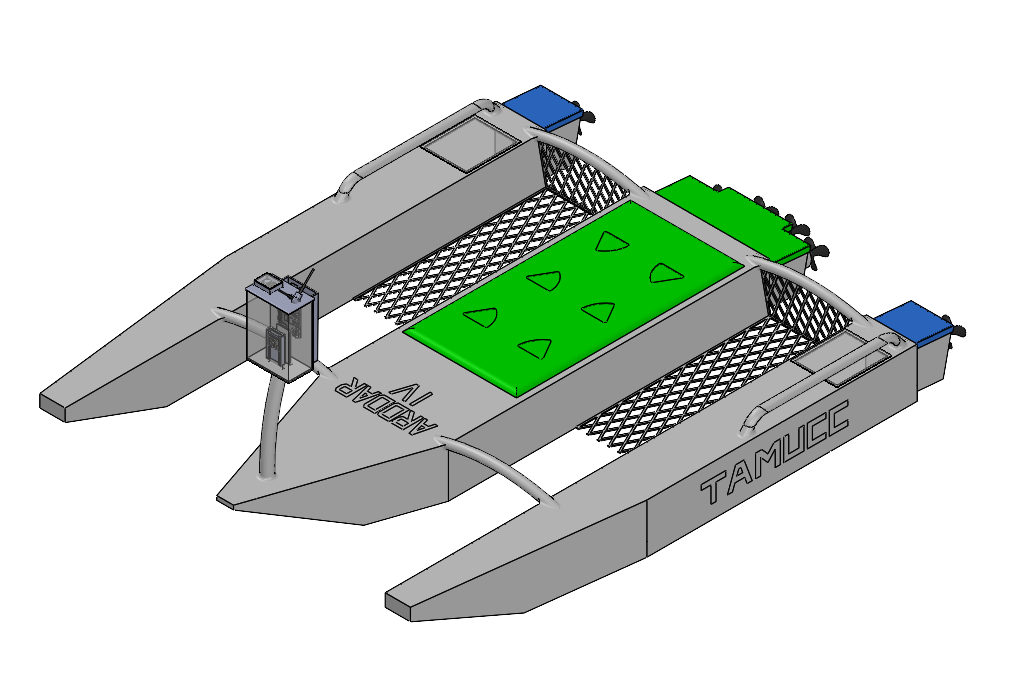
A purpose-built marine platform combining autonomous navigation, debris detection, and collection into a single deployable unit.
Powered by a Raspberry Pi 5 and Pi Camera 3 Wide, the onboard AI vision system identifies floating debris in real time with a wide-angle field of view — distinguishing trash from natural objects on the water surface.
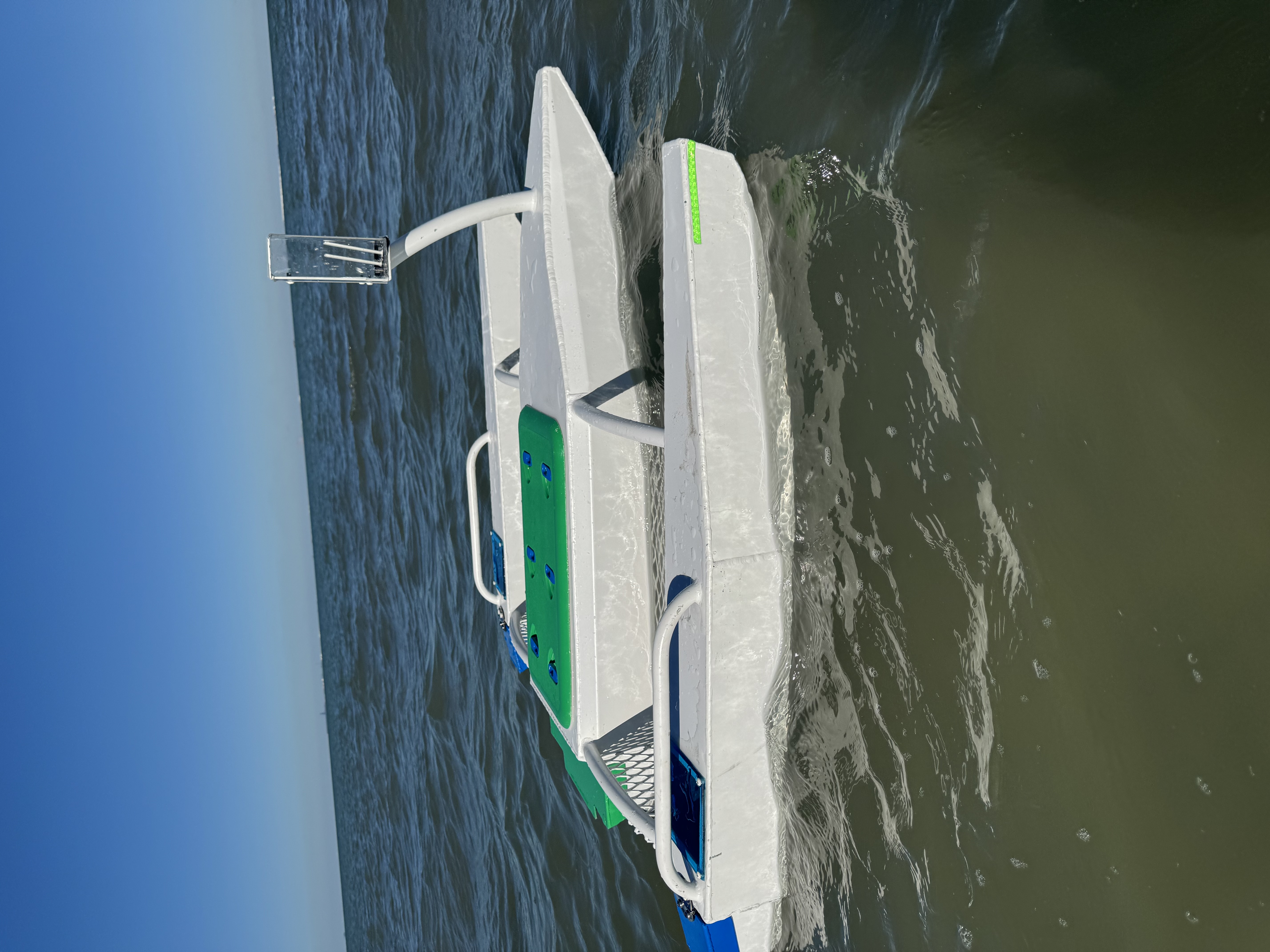
Integrated mesh netting between the twin catamaran hulls captures floating debris as the vessel moves forward, retaining collected material without requiring manual retrieval mid-mission.
Six waterproof ring motors with propellers provide omnidirectional thrust, enabling precise maneuvering in tight spaces like marinas, harbors, and coastal inlets.
Seamlessly switch between full AI autonomy and manual remote control, allowing operators to intervene for targeted collection or take over in complex scenarios.
Twin-hull design provides excellent stability in varying water conditions while creating a natural channel for debris to flow into the collection mesh.
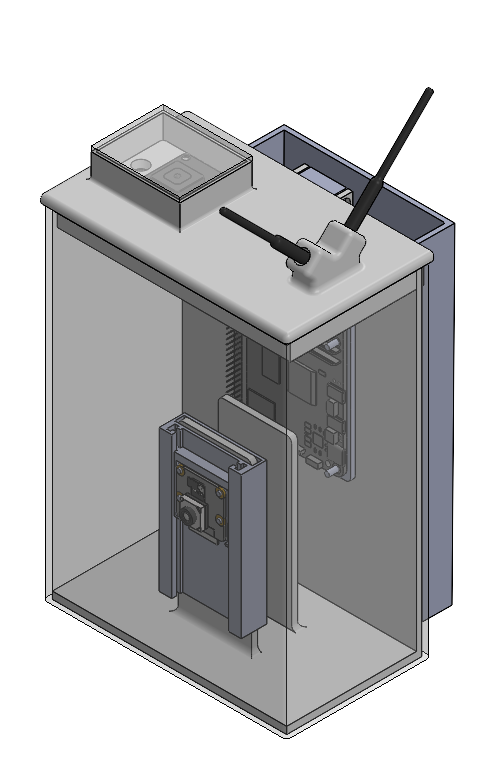
All electronics are housed in sealed enclosures with protected ESC controllers, ensuring reliable operation in marine conditions with splash and spray protection.
AI Vision System
Frames flow from the wide-angle camera into a YOLO11s model running on the Raspberry Pi, which sends steering commands through the ESP32 to all six motors at 9.8 frames per second.
The YOLO11s model was trained on a custom Roboflow dataset of labeled aquatic debris captured at TAMUCC marina test sites. Water-specific augmentation includes surface glare, rotation, and perspective warp — then exported as INT8 ONNX for 2–3× faster inference on the Pi 5.
IoT & Telemetry
ADDRAR streams real-time telemetry data from its onboard sensors via IoT, giving operators full visibility into the vessel's status, environment, and mission progress.
Battery health & voltage, debris collected, boat speed, and GPS location streamed live — updates every 2 seconds and accessible from any network.
Debris collected and boat speed displayed as live graphs on the dashboard. Full data export available as an Excel report for post-mission analysis.
Dashboard is securely exposed via Cloudflare Network Tunnel over T-Mobile 4G coverage, enabling remote access from outside the local network.
Stream real-time video from the Pi Camera 3 Wide directly to the dashboard — first-person view with live debris detection overlay.
The live dashboard runs on the robot's Raspberry Pi. When the robot is powered on and connected, operators can stream video, view telemetry, and send commands.
Environmental Intelligence
Every detected item is logged with GPS coordinates, debris class, and timestamp. The dashboard renders a time-evolving pollution heatmap — scrub the slider to watch debris accumulate across a mission, filter by debris type, and compare pollution patterns across missions and seasons.
NO DEBRIS DATA YET — COMPLETE A MISSION TO POPULATE
Predictive Intelligence
Using real-time wind and weather data from NOAA, combined with historical debris collection patterns, ADDRAR predicts where debris is most likely to concentrate — so missions can be planned proactively.
Loading weather data...
Impact & Applications
Autonomous debris removal creates measurable impact across environmental, municipal, and maritime domains.
Continuous autonomous deployment removes plastic and waste before it sinks, breaks down, or harms marine life — operating in areas that are difficult or dangerous for human crews.
City stormwater systems and urban waterways accumulate debris rapidly after rain events. ADDRAR provides a cost-effective automated cleanup alternative to manual crew dispatch.
Harbors and marinas require constant debris management to protect vessel hulls, propellers, and infrastructure. ADDRAR handles routine surface debris autonomously.
Competitive Landscape
Commercial autonomous cleanup vessels like the RanMarine WasteShark+ Pro retail for $40,000+. ADDRAR IV delivers comparable capability — plus features the commercial leader has not shipped — at roughly $2,200 in parts.
| Feature | WasteShark+ Pro | ADDRAR IV |
|---|---|---|
| Autonomous navigation | ✓ | ✓ |
| AI debris classification | Hardware only — not shipped | ✓ Fully implemented |
| Debris-type breakdown (live) | — | ✓ 5 debris classes |
| Pollution heatmap | Static | ✓ Time-evolving |
| Wildlife-aware routing | — | ✓ 3 marina animal classes |
| Live telemetry dashboard | ✓ | ✓ |
| Open data export | Excel | CSV / JSON / GeoJSON |
| Unit cost | $40,000+ | ~$2,200 BOM |
Test Results
Results from controlled pool trials and coastal water testing sessions conducted by the TAMUCC team.
Media & Results
Photos, 3D design renders, engineering drawings, and test run results from the ADDRAR IV project.



Technical Specifications
Full technical specs and bill of materials for ADDRAR IV.
| Platform | Catamaran ASV (twin-hull) |
| Compute | Raspberry Pi 5 (8 GB LPDDR4X, 128 GB microSD) |
| Camera | Pi Camera 3 Wide — 25×24 mm, 0.022 lbs |
| Propulsion | 6× HobbyStar 3670 Brushless, 1550 KV, 50A max |
| ESC | 6× Hobbywing Seaking 120A V4, 6S compatible, IP67, programmable |
| Propeller (outer 2×) | 3-blade aluminum, D=58 mm (2.283 in), P/D=1.4 |
| Propeller (inner 4×) | 3-blade aluminum, D=53 mm (2.087 in), P/D=1.4 |
| Motor Controller | ESP32 via iBus (Arduino Core) |
| Battery | 2× Turnigy 6S LiPo 22.2V 20Ah 12C (XT-90), parallel; electronics run off main bus via buck converter |
| Remote Control | FlySky FS-i6X, 2.4 GHz, 140 m range |
| GPS | Adafruit GPS Module |
| Communication | Cloudflare Tunnel / T-Mobile 4G |
| AI Model | YOLO11s / ONNX via Roboflow |
| Hull Material | Aluminum structure + 3D printed parts |
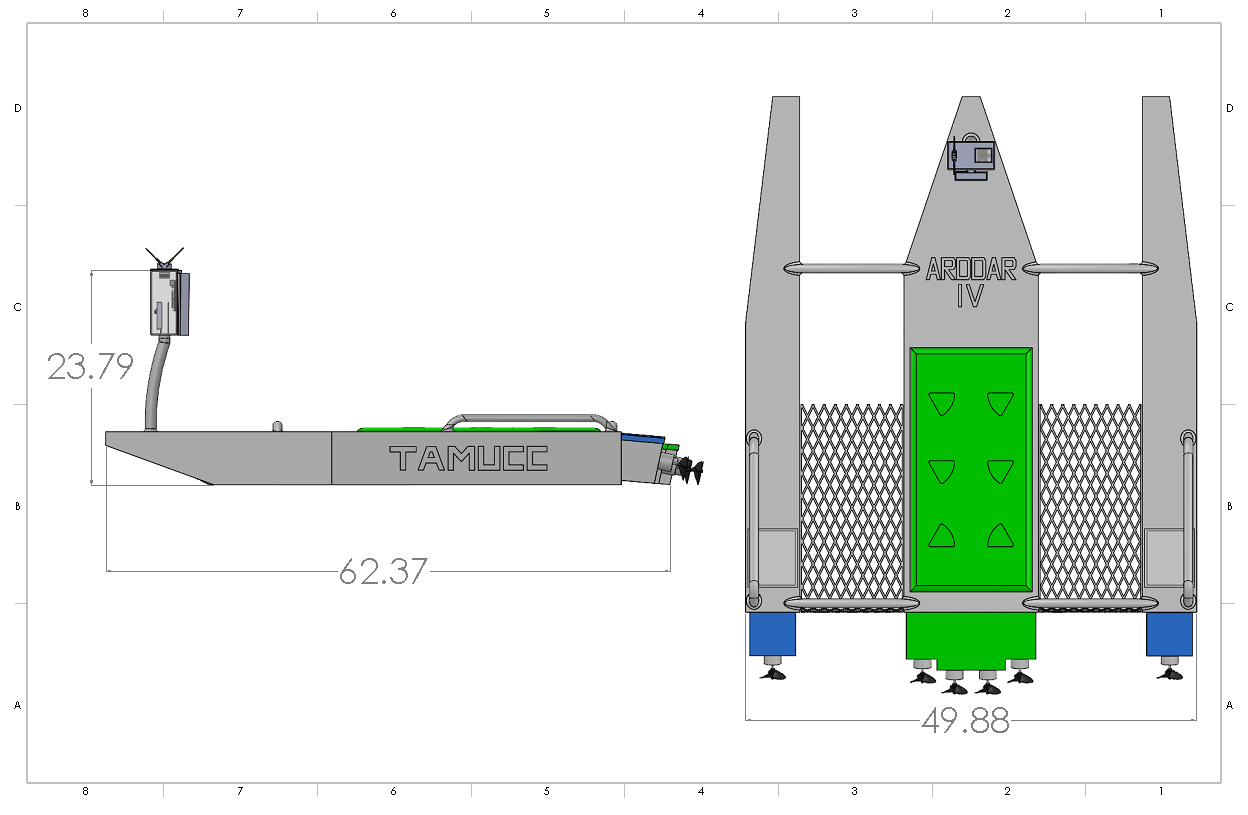
| Length | 61.85 in |
| Width | 49.88 in |
| Height | 23.75 in |
| Max Weight | <70 lbs |
| Max Speed | ~3 m/s |
| RC Range | 140 m perimeter |
| RC Override Latency | <0.5 s (AI ↔ RC switch) |
| GPS Accuracy | ±2 m |
| Ingress Rating | IP65 electronics enclosure · IP67 ESCs |
| Min Runtime | ≥20 minutes |
| Est. Cost | ~$2,200 actual / $2,500 budget (full BOM in deck) |
| Component | Description | Qty |
|---|---|---|
| RPi 5 (8 GB) | Main compute board, 128 GB microSD | 1 |
| Pi Cam 3W | Wide-angle vision camera | 1 |
| HobbyStar 3670 | Brushless motor, 1550 KV, 50A max | 6 |
| Hobbywing Seaking 120A V4 | 6S ESC, IP67, programmable | 6 |
| Propeller (outer) | 3-blade aluminum, 58 mm, P/D=1.4 | 2 |
| Propeller (inner) | 3-blade aluminum, 53 mm, P/D=1.4 | 4 |
| 6S LiPo 20Ah | Turnigy propulsion battery (22.2V, 12C) | 2 |
| ESP32-S3 | Motor controller via iBus + Arduino | 1 |
| FlySky FS-i6X | 2.4 GHz RC transmitter & receiver | 1 |
| Adafruit GPS | GPS positioning module | 1 |
| Voltage Divider | 22.2V → 3.3V for ESP32 battery read | 1 |
The Team
Senior design team at Texas A&M University Corpus Christi, College of Engineering & Computer Science.





Acknowledgements
ADDRAR IV builds on the hull and propulsion foundation laid by the Phase I team, with continued guidance from the TAMUCC engineering faculty and the Corpus Christi Marina.
This project is supported in part by NSF grant #2044255.
Common Questions
Measured runtime on two 6S 22.2V 20,000mAh LiPo packs in parallel: 53 min at full throttle, 1 hr 53 min for a realistic mission profile, and up to 2 hr 28 min at half throttle.
The onboard YOLO model is trained on multiple classes including plastic bottles and bags, foam, and mixed waste. It was trained on thousands of labeled images captured in local coastal conditions.
Yes. All electronics are sealed in waterproof enclosures, and the hull and hardware are selected for saltwater compatibility.
The confidence threshold is tuned conservatively to minimize false positives. Operators can also intervene in real time via the dashboard — the vessel supports seamless switching between autonomous and manual control.
Approximately $2,200 in parts (full BOM on the Specs page). Commercial alternatives like the RanMarine WasteShark+ Pro retail for $40,000+.
Proportional control using GPS, IMU data, and vision-based detection. The system slows and pauses when obstacles are detected in its path. Wildlife avoidance is also being trained into the AI model.
Live System Access
Access the live control and monitoring interface. The dashboard runs on the robot's Raspberry Pi — only available when the robot is powered on and connected.
The robot streams live video, telemetry, and accepts remote commands via a Cloudflare Tunnel hosted on the onboard Raspberry Pi 5. When the robot is on, the dashboard is live at dashboard.addrarlivevideo.com.
If the Pi is powered off or disconnected, the dashboard will simply be unavailable — the info site remains online regardless.